
October 15-16 2022in Lancaster, PA
After many months and many requests, we are once again offering open enrollment for our popular Modern Technologies in Rope Rescue class. Come join us in Lancaster, PA on October 15-16 2022 to learn how much more efficient your rescues can be with a few pieces of modern gear and a whole lot of practical applications learned from real world experiences. Here is your chance to keep up on the latest equipment and trends in the rope rescue world.
This class has been recently revised since the last one and will now include presentations on :
- Aerial Ladders as High Directionals
- A practical look at tip loads in different configurations.
- In depth look at the Appalachian Doortex, by the inventors of the Doortex concept!
- Pull test data associated with Boutique Bowlines. This presentation is one that we presented at the 2019 International Technical Rescue Symposium. Are you sure that fancy bowline you are using is strong enough?
- Prototype accessory pieces for the Arizona Vortex, fresh off our new milling machine at the R2T shop.
Other topics this time around include:
Use of the newly released CLUTCH from CMC/Harken. We will have two of our own available for you to use and abuse.
In depth discussion and use of the Two Tension Rope System utilizing the CLUTCH and MPD.
Use of the Arizona Vortex high directional in the urban environment.
The Rescue 2 Training original: The Appalachian Doortex! For urban anchoring and elevator rescue. High Directional? Anchor? Both!?… Come find out!
Rope Access skills for the Fire Department rescuer
…And much more.
The cost of this two day, 16 hour class is $375 per person. Just bring a harness, helmet, and any ideas or equipment you would like to see used.
Please contact Kelly Byrne at 240-462-6610 or kelly@rescue2training.com with any questions.
Please click the link below to register for the class:
https://rescue2training.com/class-registration/










Registration now open for our first Modern Technologies in Rope Rescue class of 2021!
July 17, 18 2021 in Lancaster, PA
After many months and many requests, we are once again offering open enrollment for our popular Modern Technologies in Rope Rescue class. Come join us in Lancaster, PA on July 17 and 18 2021 to learn how much more efficient your rescues can be with a few pieces of modern gear and a whole lot of practical applications learned from real world experiences. Here is your chance to keep up on the latest equipment and trends in the rope rescue world.
This class has been recently revised since the last one and will now include presentations on :
- Aerial Ladders as High Directionals
- A practical look at tip loads in different configurations.
- In depth look (with load cell measurements!) on the Appalachian Doortex
- Pull test data associated with Boutique Bowlines. This presentation is one that we presented this at last 2019 ITRS. Are you sure that fancy bowline you are using is strong enough?
- Prototype accessory pieces for the Arizona Vortex, fresh off our new milling machine at the R2T shop.
Other topics this time around include:
Use of the newly released CLUTCH from CMC/Harken. We will have two of our own available for you to use and abuse.
In depth discussion and use of the Two Tension Rope System utilizing the CLUTCH and MPD.
Use of the Arizona Vortex high directional in the urban environment.
The Rescue 2 Training original: The Appalachian Doortex! For urban anchoring and elevator rescue. High Directional? Anchor? Both!?… Come find out!
Rope Access skills for the Fire Department rescuer
…And much more.
The cost of this two day, 16 hour class is $325 per person. Just bring a harness, helmet, and any ideas or equipment you would like to see used.
Please contact Kelly Byrne at 240-462-6610 or kelly@rescue2training.com with any questions.
Click the link below to register.




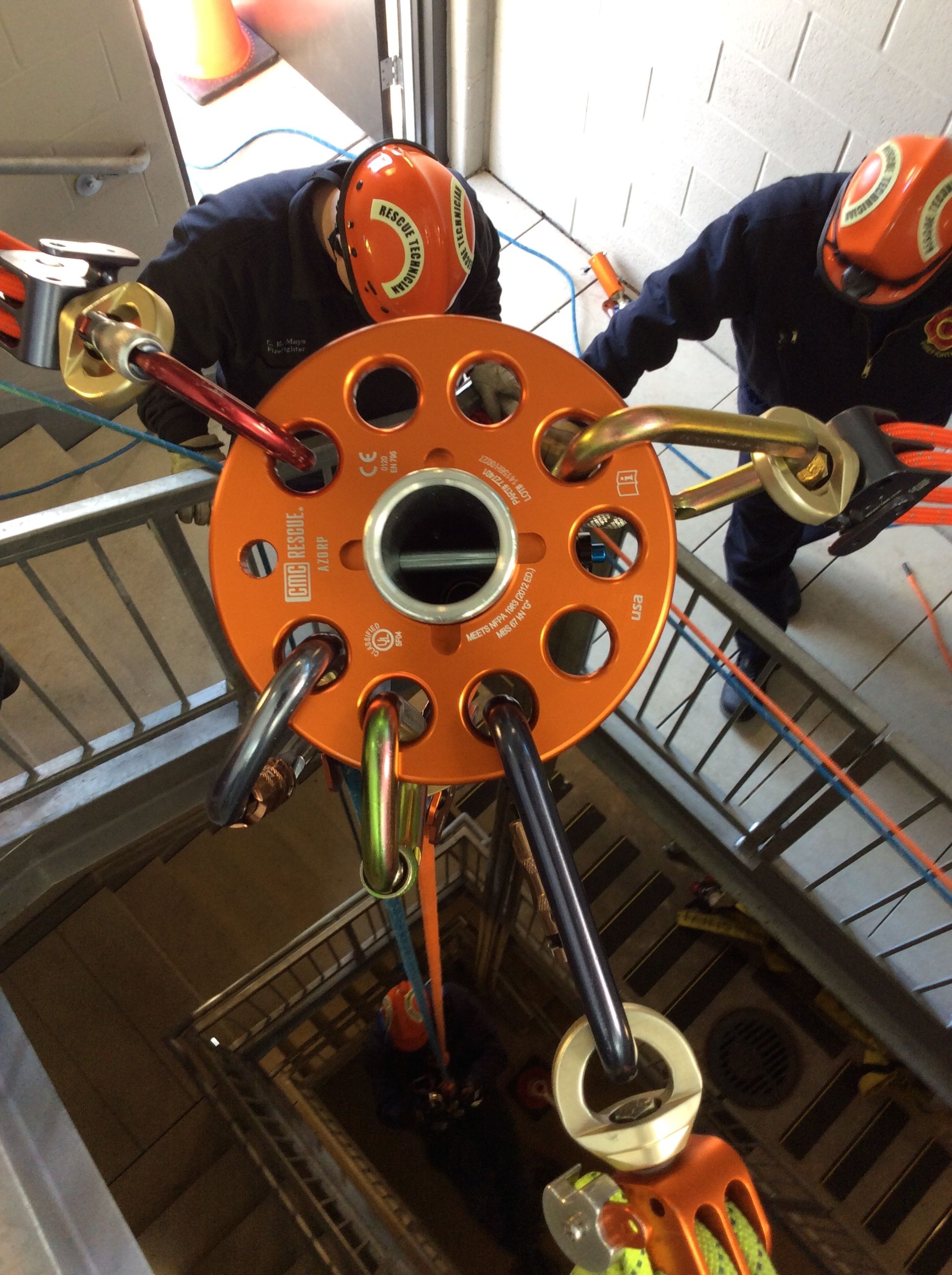
If you think rope equipment can’t be used for other things, check out the R2T Christmas Tree:

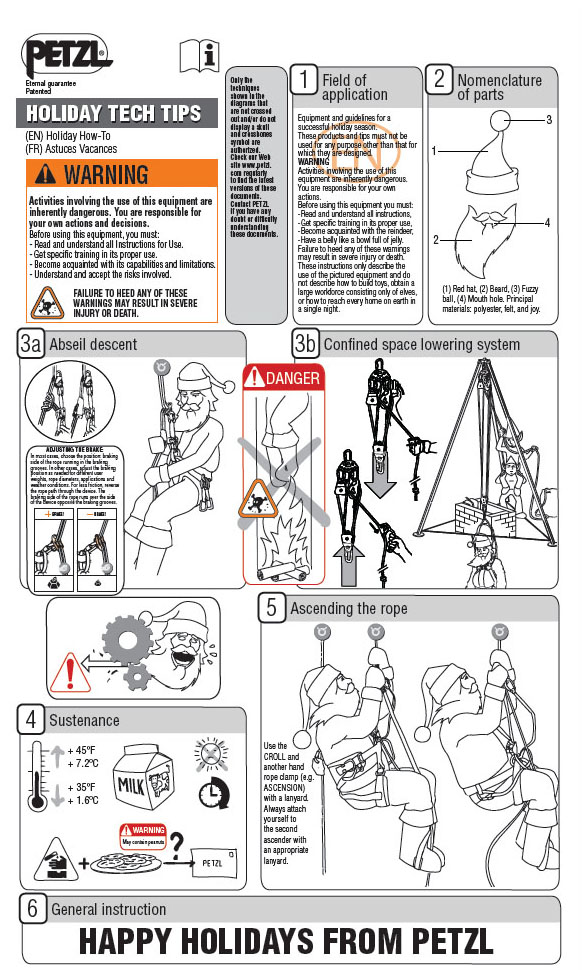
And for any would be Santa out there, please take note of the Holiday Tech Tips put out by Petzl. Many a St. Nick have caused themselves a great amount of grief by having to employ their elven rescue team due to careless beard control. The video at the bottom proves the point. This is a new to us “Santa Gets His Beard Caught Video” Enjoy!
Holy Cow! It’s been almost a year since we last added a post. Life has a way of doing that I suppose. We have been very busy over the past year with A LOT of private contract classes all over the country which has caused us to neglect the website a bit. We’ll pick it up a couple of notches this year! Here are a couple of recent incidents have brought us out of our digital hibernation.
A little over a month ago we were in Alexandria,VA teaching a one day class to each of the shifts. The class focused heavily on the Rescue 2 Training invention “the Appalachian Doortex”, a way to use the Arizona Vortex for elevator hoistway rescues. Almost a month to the day after the training, Alexandria FD used what they learned in our class and successfully set up a Doortex and removed the occupant of the elevator. If you saw the post on Facebook, there were certainly a lot of elevator mechanics chiming in!
Here’s a picture from the incident:

Two MPD’s anchored to the head and the haul system running in the hoistway.
Another elevator rescue was run on duty by our own Jason Ilowite. No Doortex this time, but there was an AZ Vortex, span anchor with a Paratech strut, a twin tension system. All cool stuff!

If you are interested in learning more about the Doortex and Twin Tension Rope Systems, stay tuned. We will be officially announcing our class for April 7 and 8 2018 in the next day or two!
Well…it’s Carbon Monoxide (CO), so there isn’t a smell. But there is something interesting going on with the hose lines in this Supplied Air Breathing Apparatus system.

115 PPM of CO !
While scouring the internet for all things pertinent to Rescue work, our newest member, Jimbo H, found an interesting after action report from LA County. Apparently, two firefighters entered a tank using SCBA to make a rescue of a downed worker. After about 15 minutes the firefighters switched from SCBA to Supplied Air; 3 minutes after the switch is when things started going downhill for them. An attentive person working the communications kit noticed the firefighters breathing funny and started the process to get them out.
I’m not sure how they switched from SCBA to SABA. It’s possible they switched out their entire system while in the space, which seems like a bad idea. Or, they could have been using their SCBA and then just hooked up to their EBSS or URC from a remote source. If that were the case, the air from the remote source would seem to be the problem.
I’m not sure that the level of CO present in our hoses and in that small of a volume would cause the same problem as experienced in LA County, but it’s interesting to note that bad air can exist in the hoses.
We repost this every year on the anniversary of Mark Falkenhan’s death because we feel very strongly that we don’t want to lose the lesson about closing the door while searching. Mark’s death is a very graphic example of how much more tenable rooms can be by simply closing the door.

If you’ve not read about this LODD, please take a minute to read some of our thoughts on it as well as the NIOSH report. There are also several fire models done by the ATF that show how the fire progressed. One interesting note: A sharp eyed reader of this website noticed a PPV fan in one of the pictures while the fire was still going on. He had asked if that had any bearing on the rapid fire spread. After reaching out to the ATF agent who did the modeling, he replied that the fan was never turned on and thus had no bearing on the fire spread.
We want to thank you, the readers, for picking up on stuff like this as well as the ATF for responding so quickly and candidly.
A link to our original article:
NIOSH report:
ONLY ONE SPOT LEFT!!!
Please email kelly@rescue2training.com to register.
Well… We blew right past our usual springtime open enrollment time frame and, after many requests, we have finally nailed down a date for our next Modern Technologies In Rope Rescue class.
Come join us in Lancaster, PA on July 23 and 24 2016 at the Lancaster County Public Service Training Center for our latest offering of the always popular Modern Technologies in Rope Rescue class. In this two day, all hands-on training, you will learn how much more efficient your rescues can be with a few pieces of modern gear and a whole lot of practical applications learned from real world experiences. Here is your chance to keep up on the latest equipment and trends in the rope rescue world.
Topics included this time around include:
Use of the AZTEK kit to pass knots, perform a pickoff, basket attending, and a whole lot more.
In depth discussion and use of the Two Tension Rope System utilizing the MPD.
Use of the Arizona Vortex high directional in the urban environment.
The Rescue 2 Training original: The Appalachian Doortex! For urban anchoring and elevator rescue. High Directional? Anchor? Both!?… Come find out!
3 dimensional anchoring with the UFO.
The Skyhook capstan winch.
…And much more.
The cost of this two day, 16 hour class is $295 per person. Just bring a harness, helmet, and any ideas or equipment you would like to see used.
Please contact Kelly Byrne at 240-462-6610 or kelly@rescue2training.com for additional registration information or questions.



Check out this video sent to us by Francisco Palacios, owner of Ascendere SAS in Cali, Columbia. There seems to be a slight disagreement between the firemen and police on the scene of this training. What they are arguing over brings itself to light around the 00:46 mark.
There seems to be much debate about how to properly load the pulley on the track line. Ultimately the law does win, but they certainly are not right.
While there is great debate about whether the mirrored Two Tensioned Rope System (TTRS) using CMC Rescue Multi-Purpose Devices (MPDs) should or shouldn’t be the way to go, one argument seems to be more popular than others regarding it: If one of the lines should fail and the person operating the second MPD fails to let go, the load will have a catastrophic fall. This is a simplified statement that I feel sums up the majority of what the argument seem to be about.
Mirrored system run off the head of an Appalachian Doortex:
What I find most interesting with this argument is that we now want to account for a SECOND point of failure i our system. What if: one rope is cut, one anchor blows out, etc… AND what if the belayer doesn’t let go, doesn’t realize the first line is compromised, etc…
No other system rope rescue system is viewed in this perspective despite the fact that any belay system can be overridden by an inattentive belay operator. So if we want to assume a second point of failure, do we need a third rope? Of course not; we need a fourth in case the third one goes. I’m kidding, of course.
The arguments seem to hinge on whether or not failure one causes failure two and if the nebulous “human factors” can be accounted for. It’s an acceptable thought, but again, we don’t apply this anywhere else in our rigging process. Otherwise we would have tertiary anchors and ropes for every main anchor and change of direction. While human factors that can affect performance and safety are certainly worth looking at, I find it difficult to see how they can be applied equally to ALL systems.
What I think this segues into is a topic of the BCCTR BCDT (or more correctly ASTM F2436-05) criteria and whether or not it needs to be changed. The MPD meets the BCDT criteria. So does a T3WP and a 540. Both of these can be overridden when in use, but meet the BCDT criteria. How do we apply an equal rule about not letting go (human factor) of a device during a belay event? I don’t think there is one. By simply doing what ever you can to make a device fail while operating it during a belay test will only lead to a witch hunt against whatever device you don’t like.
The pessimist in me wants to do a presentation at ITRS entitled “They all Suck. A look at modern belay Devices” Now of course I don’t believe that, but I think this is the area that you will get to if you try and account for human factors in a test. As a fireman, I’ve seen lots of ways people have gotten themselves in trouble and I am positive that the rope world is not ready to account for human ignorance as part of a test method. I think the line has to be drawn somewhere. To quote the great author Douglas Adams: “A common mistake that people make when trying to design something completely foolproof is to underestimate the ingenuity of complete fools.” A better idea, and one already in NFPA 1006 (make of that what you will), is to have people pass a competency test to operate a belay system.
But do we really need another test? We’ve got the BCDT to determine if the device is capable. We’ve got the “whistle test” to test our rigging if everybody were to let go. These two tests can be equally applied to a traditional main and belay system as well as a TTRS. Is there a way to devise a test that can be equally applied to every system? If there isn’t, then maybe now is the time to figure it out. If not then I think the arguments, while not pointless, will probably not be solved. I can stand on one side of the argument and talk until I am blue in the face that the the TTRS with MPDs meets all of our current criteria and somebody else can stand on the other side and talk about what will happen when somebody doesn’t let go of the handle.
Here is a suggestion for one (expensive) way to solve this problem:

While the Petzl ASAP and L57 Absorbica are rated for two person loads for what Petzl calls “Accompanied Descent”, it is not shown in the instruction manual that you can attach it to the anchor to be used in the way shown in the picture above. I am extrapolating that it can be used that way. I have not tested this method yet, so I am only guessing as to its effectiveness. It is merely a possible solution to a problem that people have with an MPD based TTRS.
We get all off the benefits the TTRS has to offer as well as being protected from a runaway belay in the event of an inattentive operator.
Is an MPD based TTRS the be all, end all of rope rescue? Maybe, maybe not. But I do think it solves more problems than it causes. It also allows people who are required to perform rope rescue but don’t like it a safe way to operate, while at the same time allowing some unique options for the geek that a traditional slack belay system doesn’t allow.